Large Scale Distributed Deep Networks
Jeffrey Dean, Greg S. Corrado, Rajat Monga, Kai Chen,
Matthieu Devin, Quoc V. Le, Mark Z. Mao, Marc’Aurelio Ranzato,
Andrew Senior, Paul Tucker, Ke Yang, Andrew Y. Ng
{jeff, gcorrado}@google.com
Google Inc., Mountain View, CA
Abstract
Recent work in unsupervised feature learning and deep learning has shown that being able to train large models can dramatically improve performance. In this paper, we consider the problem of training a deep network with billions of parameters using tens of thousands of CPU cores. We have developed a software framework called DistBelief that can utilize computing clusters with thousands of machines to train large models. Within this framework, we have developed two algorithms for large-scale distributed training: (i) Downpour SGD, an asynchronous stochastic gradient descent procedure supporting a large number of model replicas, and (ii) Sandblaster, a framework that supports a variety of distributed batch optimization procedures, including a distributed implementation of L-BFGS. Downpour SGD and Sandblaster L-BFGS both increase the scale and speed of deep network training. We have successfully used our system to train a deep network 30x larger than previously reported in the literature, and achieves state-of-the-art performance on ImageNet, a visual object recognition task with 16 million images and 21k categories. We show that these same techniques dramatically accelerate the training of a more modestly-sized deep network for a commercial speech recognition service. Although we focus on and report performance of these methods as applied to training large neural networks, the underlying algorithms are applicable to any gradient-based machine learning algorithm.
Executive Summary: The rapid growth of data in fields like image recognition and speech processing has outpaced the ability of traditional computing methods to train advanced neural networks—systems with many interconnected layers that mimic human learning. These networks excel at tasks such as identifying objects in photos or converting speech to text, but training them on massive datasets requires immense computational power. Current approaches, like using graphics processing units (GPUs), hit limits when models exceed a few million parameters or datasets surpass billions of examples, as GPUs lack sufficient memory and speed for such scales. This bottleneck slows innovation in artificial intelligence applications, from search engines to voice assistants, making it urgent to find ways to distribute training across ordinary computer clusters.
This document introduces DistBelief, a software framework designed to train neural networks with billions of parameters using thousands of standard CPU cores across many machines. The goal was to demonstrate that distributed computing can both speed up training of mid-sized models and enable entirely new scales of network size, while achieving top performance on real-world benchmarks in image and speech recognition.
The team built DistBelief to split network computations across machines (model parallelism) and run multiple copies of the network simultaneously on data subsets (data parallelism), handling communication and failures automatically. They developed two optimization methods: Downpour SGD, an asynchronous version of the standard gradient descent technique that updates parameters without waiting for all machines to sync, enhanced by adaptive learning rates; and Sandblaster, a system for batch methods like L-BFGS that balances workloads across replicas. Experiments used a speech recognition model with 42 million parameters trained on 1.1 billion audio examples from 2011–2012 data, and a larger image model with 1.7 billion parameters on the ImageNet dataset of 16 million photos across 21,000 categories. Benchmarks ran on Google clusters with up to 2,000 machines and 30,000 cores, assuming reliable networks and no major hardware failures.
Key results showed that DistBelief enabled training a 1.7 billion-parameter image network, 30 times larger than prior reports, achieving 15% accuracy on ImageNet—a 60% relative gain over previous bests. For the speech model, Downpour SGD with adaptive rates trained to target accuracy in under one-tenth the time of a single GPU, using 200 replicas on about 1,600 cores, while standard single-replica training lagged far behind. Sandblaster L-BFGS with 2,000 replicas was competitive, reaching the same accuracy 3–5 times faster than GPU for resource-heavy setups. Model parallelism alone sped up the large image network by over 12 times using 81 machines, though gains tapered beyond that due to communication delays. Surprisingly, the asynchronous Downpour method, not typically used for complex non-linear problems, proved stable and effective when paired with adaptive rates.
These findings mean organizations can now train more powerful neural networks faster and at larger scales without relying on scarce, expensive GPUs, reducing costs and timelines for AI development. For instance, speech models for commercial services could deploy quicker with higher accuracy, improving user experiences in products like voice search. The results challenge assumptions that strict synchronization is needed for deep learning, opening doors to robust, failure-tolerant systems on commodity hardware. Unlike smaller GPU-based models, this approach handles high-resolution data without downsizing, boosting performance in vision tasks by 60% relatively, which could enhance applications from autonomous vehicles to medical imaging.
To capitalize on this, adopt DistBelief with Downpour SGD and adaptive rates as the primary method for projects up to 2,000 cores, prioritizing speed and simplicity; switch to Sandblaster L-BFGS for setups exceeding 10,000 cores where bandwidth efficiency matters, though it trades some flexibility for scaling. Pilot these on upcoming AI initiatives, starting with speech or image tasks, and allocate cluster resources accordingly—expect 5–10x time savings versus GPUs. Further scale by training even larger models on emerging datasets, but first validate on diverse hardware to refine load balancing.
Confidence in these results is high, backed by direct comparisons on standard benchmarks, but limitations include dependency on large, stable clusters (stragglers or failures can slow progress by 10–20%) and assumptions of low-latency networks, which may not hold in all environments. Smaller setups or highly connected network designs show diminishing returns, so caution applies when adapting to non-Google infrastructure without additional tuning.
1 Introduction
Section Summary: Deep learning techniques have achieved impressive results in areas like speech recognition, image analysis, and text processing, with performance improving dramatically as models grow larger in terms of data and parameters. However, training these large models efficiently is challenging, especially on GPUs limited by memory, so researchers often shrink the data or models, which isn't ideal for massive datasets like high-resolution images. This paper introduces DistBelief, a software system for distributing training across multiple machines, featuring innovative methods like Downpour SGD and Sandblaster L-BFGS that speed up the process; experiments show these enable faster training of standard models and unprecedented large ones, such as a billion-parameter network that sets new benchmarks on the ImageNet image dataset.
Deep learning and unsupervised feature learning have shown great promise in many practical applications. State-of-the-art performance has been reported in several domains, ranging from speech recognition [1, 2], visual object recognition [3, 4], to text processing [5, 6].
It has also been observed that increasing the scale of deep learning, with respect to the number of training examples, the number of model parameters, or both, can drastically improve ultimate classification accuracy [3, 4, 7]. These results have led to a surge of interest in scaling up the training and inference algorithms used for these models [8] and in improving applicable optimization procedures [7, 9]. The use of GPUs [1, 2, 3, 8] is a significant advance in recent years that makes the training of modestly sized deep networks practical. A known limitation of the GPU approach is that the training speed-up is small when the model does not fit in GPU memory (typically less than 6 gigabytes). To use a GPU effectively, researchers often reduce the size of the data or parameters so that CPU-to-GPU transfers are not a significant bottleneck. While data and parameter reduction work well for small problems (e.g. acoustic modeling for speech recognition), they are less attractive for problems with a large number of examples and dimensions (e.g., high-resolution images).
In this paper, we describe an alternative approach: using large-scale clusters of machines to distribute training and inference in deep networks. We have developed a software framework called DistBelief that enables model parallelism within a machine (via multithreading) and across machines (via message passing), with the details of parallelism, synchronization and communication managed by the framework. In addition to supporting model parallelism, the DistBelief framework also supports data parallelism, where multiple replicas of a model are used to optimize a single objective. Within this framework, we have designed and implemented two novel methods for large-scale distributed training: (i) Downpour SGD, an asynchronous stochastic gradient descent procedure which leverages adaptive learning rates and supports a large number of model replicas, and (ii) Sandblaster L-BFGS, a distributed implementation of L-BFGS that uses both data and model parallelism.[^1] Both Downpour SGD and Sandblaster L-BFGS enjoy significant speed gains compared to more conventional implementations of SGD and L-BFGS.
[^1]: We implemented L-BFGS within the Sandblaster framework, but the general approach is also suitable for a variety of other batch optimization methods.
Our experiments reveal several surprising results about large-scale nonconvex optimization. Firstly, asynchronous SGD, rarely applied to nonconvex problems, works very well for training deep networks, particularly when combined with Adagrad [10] adaptive learning rates. Secondly, we show that given sufficient resources, L-BFGS is competitive with or faster than many variants of SGD.
With regard to specific applications in deep learning, we report two main findings: that our distributed optimization approach can both greatly accelerate the training of modestly sized models, and that it can also train models that are larger than could be contemplated otherwise. To illustrate the first point, we show that we can use a cluster of machines to train a modestly sized speech model to the same classification accuracy in less than 1/10th the time required on a GPU. To illustrate the second point, we trained a large neural network of more than 1 billion parameters and used this network to drastically improve on state-of-the-art performance on the ImageNet dataset, one of the largest datasets in computer vision.
2 Previous work
Section Summary: Recent years have seen rapid growth in machine learning datasets, prompting researchers to scale algorithms through parallel and distributed computing, often focusing on simpler models with synchronized or delayed gradient updates, or handling sparse data on single machines. In deep learning, efforts have mostly involved training smaller models on one computer or using GPU clusters for averaged predictions, but the authors aim to train massive models with billions of parameters across multiple machines via a mix of model and data parallelism, without limiting the model's structure. They evaluated tools like MapReduce, which doesn't fit iterative training, and GraphLab, which overlooks efficiencies in deep networks' structured designs.
In recent years commercial and academic machine learning data sets have grown at an unprecedented pace. In response, a great many authors have explored scaling up machine learning algorithms through parallelization and distribution [11, 12, 13, 14, 15, 16, 17]. Much of this research has focused on linear, convex models, where distributed gradient computation is the natural first step. Within this area, some groups have relaxed synchronization requirements, exploring delayed gradient updates for convex problems [12, 17]. In parallel, other groups working on problems with sparse gradients (problems where only a tiny fraction of the coordinates of the gradient vector are non-zero for any given training example) have explored lock-less asynchronous stochastic gradient descent on shared-memory architectures (i.e. single machines) [5, 18]. We are interested in an approach that captures the best of both worlds, allowing the use of a cluster of machines asynchronously computing gradients, but without requiring that the problem be either convex or sparse.
In the context of deep learning, most work has focused on training relatively small models on a single machine (e.g., Theano [19]). Suggestions for scaling up deep learning include the use of a farm of GPUs to train a collection of many small models and subsequently averaging their predictions [20], or modifying standard deep networks to make them inherently more parallelizable [21]. Our focus is scaling deep learning techniques in the direction of training very large models, those with a few billion parameters, but without introducing restrictions on the form of the model. In special cases where one layer dominates computation, some authors have considered distributing computation in that one layer and replicating computation in the remaining layers [5]. But in the general case where many layers of the model are computationally intensive, full model parallelism in a spirit similar to [22] is required. To be successful, however, we believe that model parallelism must be combined with clever distributed optimization techniques that leverage data parallelism.
We considered a number of existing large-scale computational tools for application to our problem, MapReduce [23] and GraphLab [24] being notable examples. We concluded that MapReduce, designed for parallel data processing, was ill-suited for the iterative computations inherent in deep network training; whereas GraphLab, designed for general (unstructured) graph computations, would not exploit computing efficiencies available in the structured graphs typically found in deep networks.
3 Model parallelism
Section Summary: DistBelief is a software framework designed to train massive deep neural networks by distributing the workload across multiple computers, allowing users to define how calculations happen at different parts of the model and how data is shared between them. For very large models, the system splits the computation among machines, automatically handling parallel processing on each one and managing communication during training and use, which can lead to big speedups—up to 144 partitions for huge models or 8 to 16 for smaller ones—especially when the model's connections are not fully interconnected. While challenges like uneven processing speeds across machines can slow things down, combining this with other techniques enables training on thousands of CPU cores, dramatically cutting overall time.
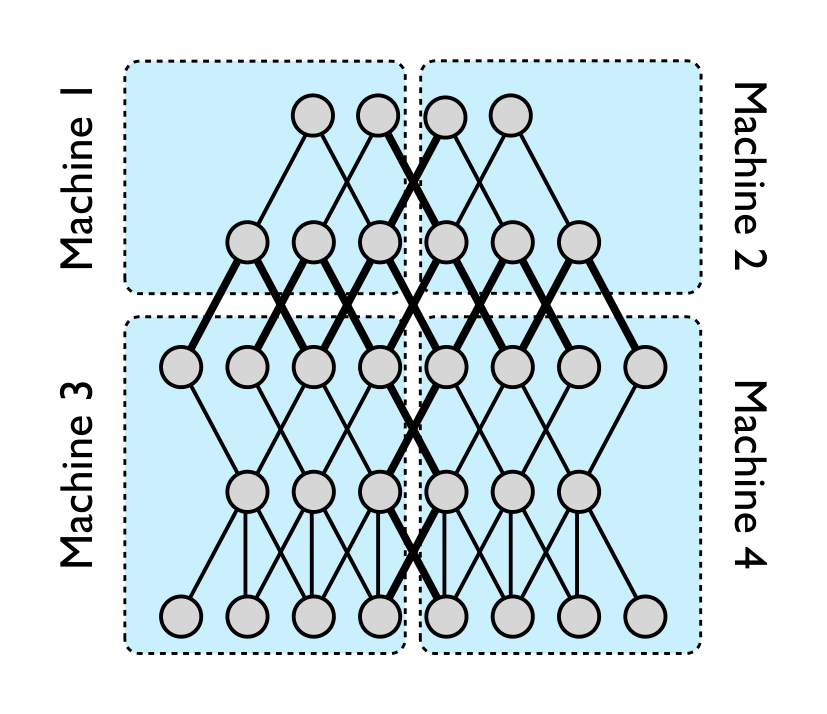
To facilitate the training of very large deep networks, we have developed a software framework, DistBelief, that supports distributed computation in neural networks and layered graphical models. The user defines the computation that takes place at each node in each layer of the model, and the messages that should be passed during the upward and downward phases of computation.[^2] For large models, the user may partition the model across several machines (Figure 1), so that responsibility for the computation for different nodes is assigned to different machines. The framework automatically parallelizes computation in each machine using all available cores, and manages communication, synchronization and data transfer between machines during both training and inference.
[^2]: In the case of a neural network ‘upward’ and ‘downward’ might equally well be called ‘feedforward’ and ‘backprop’, while for a Hidden Markov Model, they might be more familiar as ‘forward’ and ‘backward’.
The performance benefits of distributing a deep network across multiple machines depends on the connectivity structure and computational needs of the model. Models with a large number of parameters or high computational demands typically benefit from access to more CPUs and memory, up to the point where communication costs dominate. We have successfully run large models with up to 144 partitions in the DistBelief framework with significant speedups, while more modestly sized models show decent speedups for up to 8 or 16 partitions. (See Section 5, under the heading Model Parallelism Benchmarks, for experimental results.) Obviously, models with local connectivity structures tend to be more amenable to extensive distribution than fully-connected structures, given their lower communication requirements. The typical cause of less-than-ideal speedups is variance in processing times across the different machines, leading to many machines waiting for the single slowest machine to finish a given phase of computation. Nonetheless, for our largest models, we can efficiently use 32 machines where each machine achieves an average CPU utilization of 16 cores, for a total of 512 CPU cores training a single large neural network. When combined with the distributed optimization algorithms described in the next section, which utilize multiple replicas of the entire neural network, it is possible to use tens of thousands of CPU cores for training a single model, leading to significant reductions in overall training times.
4 Distributed optimization algorithms
Section Summary: To train massive neural networks quickly, the DistBelief system distributes the work across multiple copies, or replicas, of the model that process different parts of the training data simultaneously and share updates through a central server divided among machines. This section compares two approaches: Downpour SGD, an asynchronous method where replicas independently fetch parameters, compute changes based on data mini-batches, and send updates without waiting for each other, and Sandblaster L-BFGS, a coordinated batch method that orchestrates larger data sets for optimization. Both methods handle uneven speeds or failures in replicas gracefully, acting like a smart way to divide and combine data processing for more efficient training.
Parallelizing computation within the DistBelief framework allows us to instantiate and run neural networks considerably larger than have been previously reported. But in order to train such large models in a reasonable amount of time, we need to parallelize computation not only within a single instance of the model, but to distribute training across multiple model instances. In this section we describe this second level of parallelism, where we employ a set of DistBelief model instances, or replicas, to simultaneously solve a single optimization problem.
We present a comparison of two large-scale distributed optimization procedures: Downpour SGD, an online method, and Sandblaster L-BFGS, a batch method. Both methods leverage the concept of a centralized sharded parameter server, which model replicas use to share their parameters. Both methods take advantage of the distributed computation DistBelief allows within each individual replica. But most importantly, both methods are designed to tolerate variance in the processing speed of different model replicas, and even the wholesale failure of model replicas which may be taken offline or restarted at random.
In a sense, these two optimization algorithms implement an intelligent version of data parallelism. Both approaches allow us to simultaneously process distinct training examples in each of the many model replicas, and periodically combine their results to optimize our objective function.
4.1 Downpour SGD
Stochastic gradient descent (SGD) is perhaps the most commonly used optimization procedure for training deep neural networks [25, 26, 3]. Unfortunately, the traditional formulation of SGD is inherently sequential, making it impractical to apply to very large data sets where the time required to move through the data in an entirely serial fashion is prohibitive.
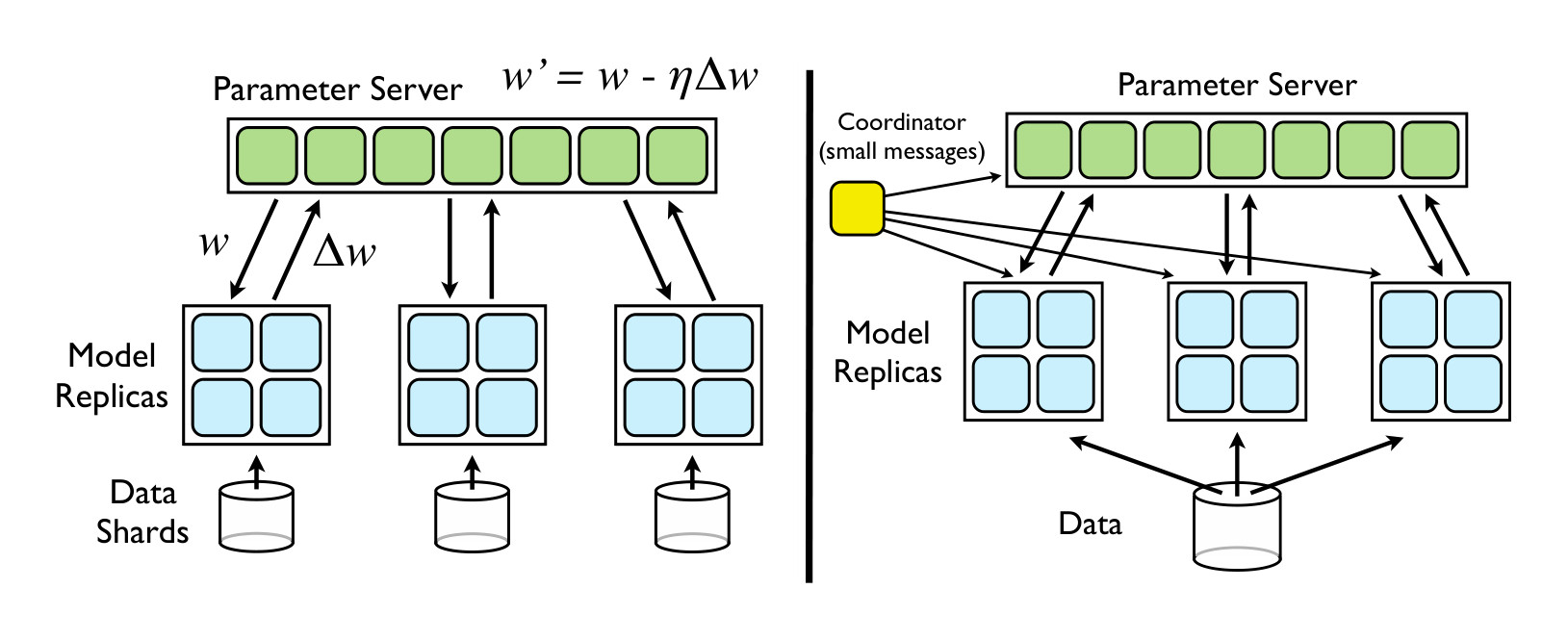
To apply SGD to large data sets, we introduce Downpour SGD, a variant of asynchronous stochastic gradient descent that uses multiple replicas of a single DistBelief model. The basic approach is as follows: We divide the training data into a number of subsets and run a copy of the model on each of these subsets. The models communicate updates through a centralized parameter server, which keeps the current state of all parameters for the model, sharded across many machines (e.g., if we have 10 parameter server shards, each shard is responsible for storing and applying updates to 1/10th of the model parameters) (Figure 2). This approach is asynchronous in two distinct aspects: the model replicas run independently of each other, and the parameter server shards also run independently of one another.
In the simplest implementation, before processing each mini-batch, a model replica asks the parameter server service for an updated copy of its model parameters. Because DistBelief models are themselves partitioned across multiple machines, each machine needs to communicate with just the subset of parameter server shards that hold the model parameters relevant to its partition. After receiving an updated copy of its parameters, the DistBelief model replica processes a mini-batch of data to compute a parameter gradient, and sends the gradient to the parameter server, which then applies the gradient to the current value of the model parameters.
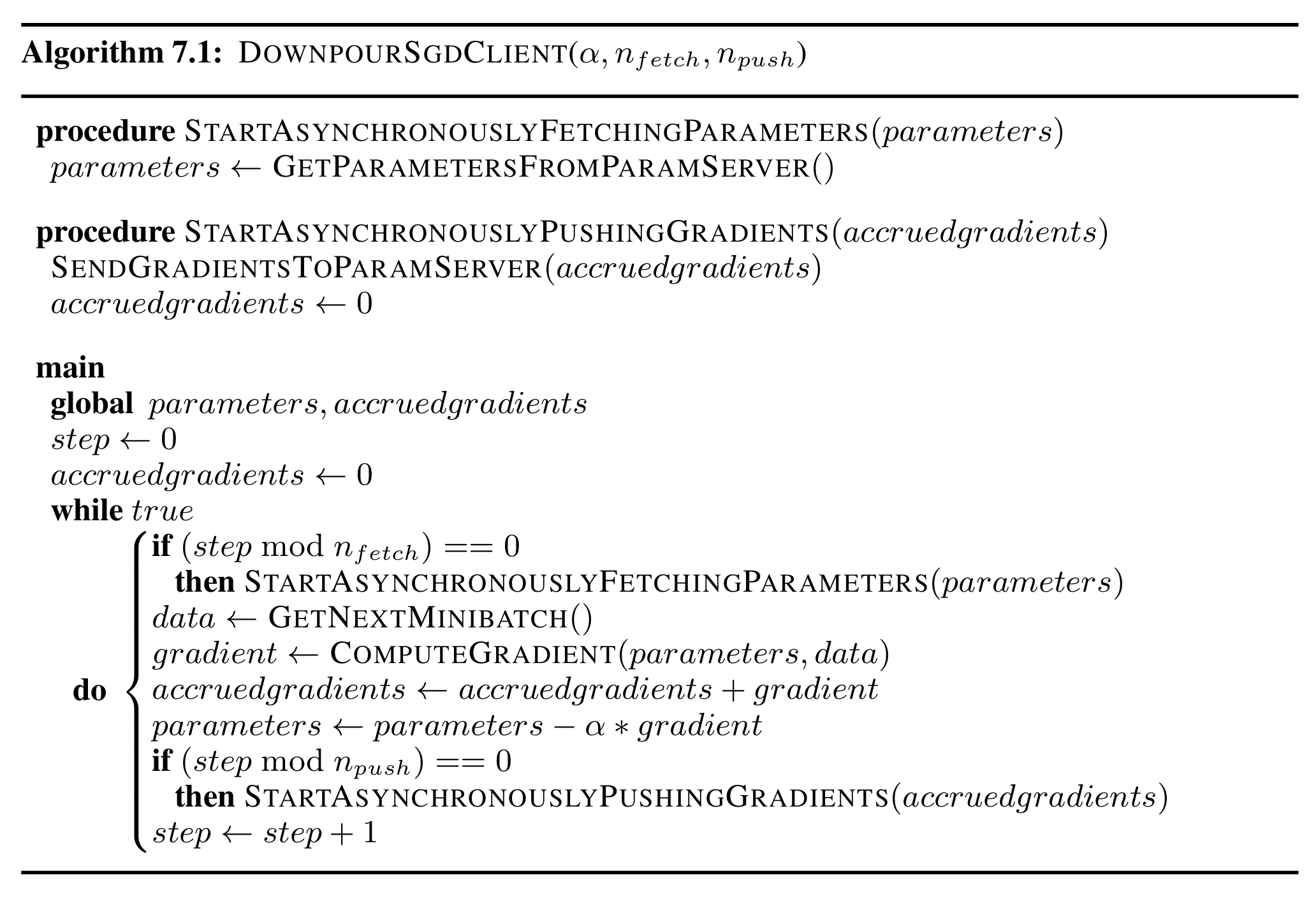
It is possible to reduce the communication overhead of Downpour SGD by limiting each model replica to request updated parameters only every $n_{fetch}$ steps and send updated gradient values only every $n_{push}$ steps (where $n_{fetch}$ might not be equal to $n_{push}$). In fact, the process of fetching parameters, pushing gradients, and processing training data can be carried out in three only weakly synchronized threads (see the Appendix for pseudocode). In the experiments reported below we fixed $n_{fetch} = n_{push} = 1$ for simplicity and ease of comparison to traditional SGD.
Downpour SGD is more robust to machines failures than standard (synchronous) SGD. For synchronous SGD, if one machine fails, the entire training process is delayed; whereas for asynchronous SGD, if one machine in a model replica fails, the other model replicas continue processing their training data and updating the model parameters via the parameter servers. On the other hand, the multiple forms of asynchronous processing in Downpour SGD introduce a great deal of additional stochasticity in the optimization procedure. Most obviously, a model replica is almost certainly computing its gradients based on a set of parameters that are slightly out of date, in that some other model replica will likely have updated the parameters on the parameter server in the meantime. But there are several other sources of stochasticity beyond this: Because the parameter server shards act independently, there is no guarantee that at any given moment the parameters on each shard of the parameter server have undergone the same number of updates, or that the updates were applied in the same order. Moreover, because the model replicas are permitted to fetch parameters and push gradients in separate threads, there may be additional subtle inconsistencies in the timestamps of parameters. There is little theoretical grounding for the safety of these operations for nonconvex problems, but in practice we found relaxing consistency requirements to be remarkably effective.
One technique that we have found to greatly increase the robustness of Downpour SGD is the use of the Adagrad [10] adaptive learning rate procedure. Rather than using a single fixed learning rate on the parameter sever ($\eta$ in Figure 2), Adagrad uses a separate adaptive learning rate for each parameter. Let $\eta_{i,K}$ be the learning rate of the $i$-th parameter at iteration $K$ and $\Delta w_{i,K}$ its gradient, then we set: $\eta_{i,K} = \gamma/\sqrt{\sum_{j=1}^K \Delta w_{i,j}^2}$. Because these learning rates are computed only from the summed squared gradients of each parameter, Adagrad is easily implemented locally within each parameter server shard. The value of $\gamma$, the constant scaling factor for all learning rates, is generally larger (perhaps by an order of magnitude) than the best fixed learning rate used without Adagrad. The use of Adagrad extends the maximum number of model replicas that can productively work simultaneously, and combined with a practice of “warmstarting” model training with only a single model replica before unleashing the other replicas, it has virtually eliminated stability concerns in training deep networks using Downpour SGD (see results in Section 5).
4.2 Sandblaster L-BFGS
Batch methods have been shown to work well in training small deep networks [7]. To apply these methods to large models and large datasets, we introduce the Sandblaster batch optimization framework and discuss an implementation of L-BFGS using this framework.
A key idea in Sandblaster is distributed parameter storage and manipulation. The core of the optimization algorithm (e.g L-BFGS) resides in a coordinator process (Figure 2), which does not have direct access to the model parameters. Instead, the coordinator issues commands drawn from a small set of operations (e.g., dot product, scaling, coefficient-wise addition, multiplication) that can be performed by each parameter server shard independently, with the results being stored locally on the same shard. Additional information, e.g the history cache for L-BFGS, is also stored on the parameter server shard on which it was computed. This allows running large models (billions of parameters) without incurring the overhead of sending all the parameters and gradients to a single central server. (See the Appendix for pseudocode.)
In typical parallelized implementations of L-BFGS, data is distributed to many machines and each machine is responsible for computing the gradient on a specific subset of data examples. The gradients are sent back to a central server (or aggregated via a tree [16]). Many such methods wait for the slowest machine, and therefore do not scale well to large shared clusters. To account for this problem, we employ the following load balancing scheme: The coordinator assigns each of the N model replicas a small portion of work, much smaller than 1/Nth of the total size of a batch, and assigns replicas new portions whenever they are free. With this approach, faster model replicas do more work than slower replicas. To further manage slow model replicas at the end of a batch, the coordinator schedules multiple copies of the outstanding portions and uses the result from whichever model replica finishes first. This scheme is similar to the use of “backup tasks” in the MapReduce framework [23]. Prefetching of data, along with supporting data affinity by assigning sequential portions of data to the same worker makes data access a non-issue. In contrast with Downpour SGD, which requires relatively high frequency, high bandwidth parameter synchronization with the parameter server, Sandblaster workers only fetch parameters at the beginning of each batch (when they have been updated by the coordinator), and only send the gradients every few completed portions (to protect against replica failures and restarts).
5 Experiments
Section Summary: Researchers tested their optimization algorithms on two deep learning tasks: classifying audio snippets for speech recognition using a network with about 42 million parameters, and recognizing objects in images using much larger networks with up to 1.7 billion parameters trained on millions of pictures. For model parallelism, they found that splitting the work across more computers sped up training significantly for big image models—up to 12 times faster with 81 machines—but smaller speech models peaked at eight machines before slowing down due to communication overheads. Comparing optimization methods, distributed approaches like Downpour SGD with adaptive learning rates and Sandblaster L-BFGS trained models much faster than standard single-machine methods or even GPU training, especially when using hundreds of replicas, allowing high accuracy in less time with more resources.
We evaluated our optimization algorithms by applying them to training models for two different deep learning problems: object recognition in still images and acoustic processing for speech recognition.
The speech recognition task was to classify the central region (or frame) in a short snippet of audio as one of several thousand acoustic states. We used a deep network with five layers: four hidden layer with sigmoidal activations and 2560 nodes each, and a softmax output layer with 8192 nodes. The input representation was 11 consecutive overlapping 25 ms frames of speech, each represented by 40 log-energy values. The network was fully-connected layer-to-layer, for a total of approximately 42 million model parameters. We trained on a data set of 1.1 billion weakly labeled examples, and evaluated on a hold out test set. See [27] for similar deep network configurations and training procedures.
For visual object recognition we trained a larger neural network with locally-connected receptive fields on the ImageNet data set of 16 million images, each of which we scaled to 100x100 pixels [28]. The network had three stages, each composed of filtering, pooling and local contrast normalization, where each node in the filtering layer was connected to a 10x10 patch in the layer below. Our infrastructure allows many nodes to connect to the same input patch, and we ran experiments varying the number of identically connected nodes from 8 to 36. The output layer consisted of 21 thousand one-vs-all logistic classifier nodes, one for each of the ImageNet object categories. See [29] for similar deep network configurations and training procedures.
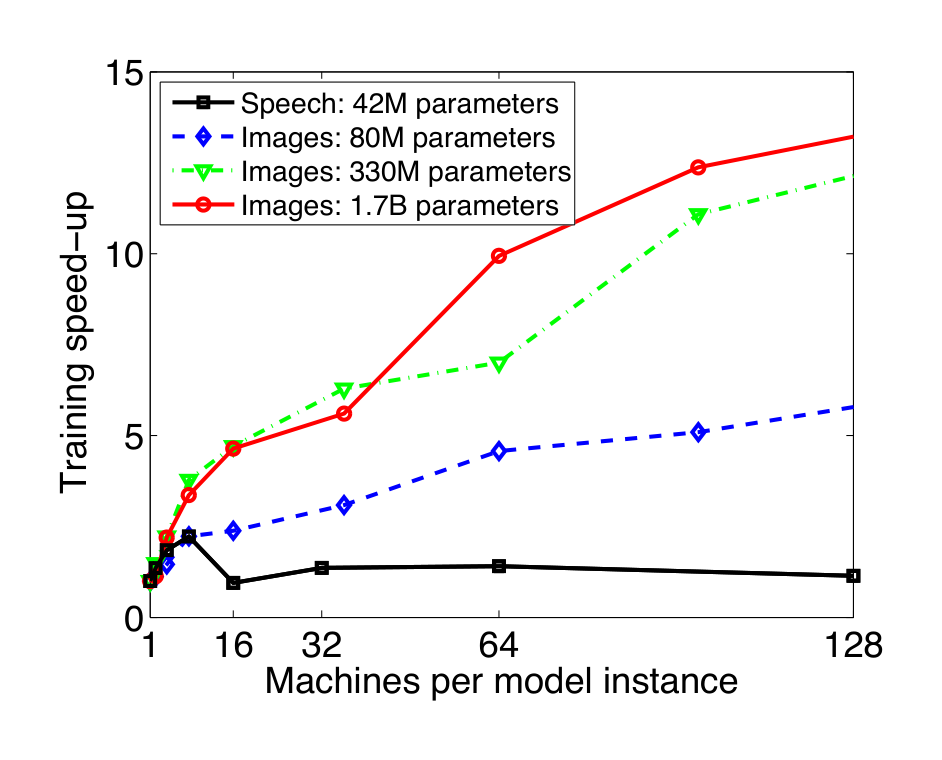
Model parallelism benchmarks: To explore the scaling behavior of DistBelief model parallelism (Section 3), we measured the mean time to process a single mini-batch for simple SGD training as a function of the number of partitions (machines) used in a single model instance. In Figure 3 we quantify the impact of parallelizing across N machines by reporting the average training speed-up: the ratio of the time taken using only a single machine to the time taken using N. Speedups for inference steps in these models are similar and are not shown here.
The moderately sized speech model runs fastest on 8 machines, computing $2.2\times$ faster than using a single machine. (Models were configured to use no more than 20 cores per machine.) Partitioning the model on more than 8 machines actually slows training, as network overhead starts to dominate in the fully-connected network structure and there is less work for each machine to perform with more partitions.
In contrast, the much larger, locally-connected image models can benefit from using many more machines per model replica. The largest model, with 1.7 billion parameters benefits the most, giving a speedup of more than $12\times$ using 81 machines. For these large models using more machines continues to increase speed, but with diminishing returns.
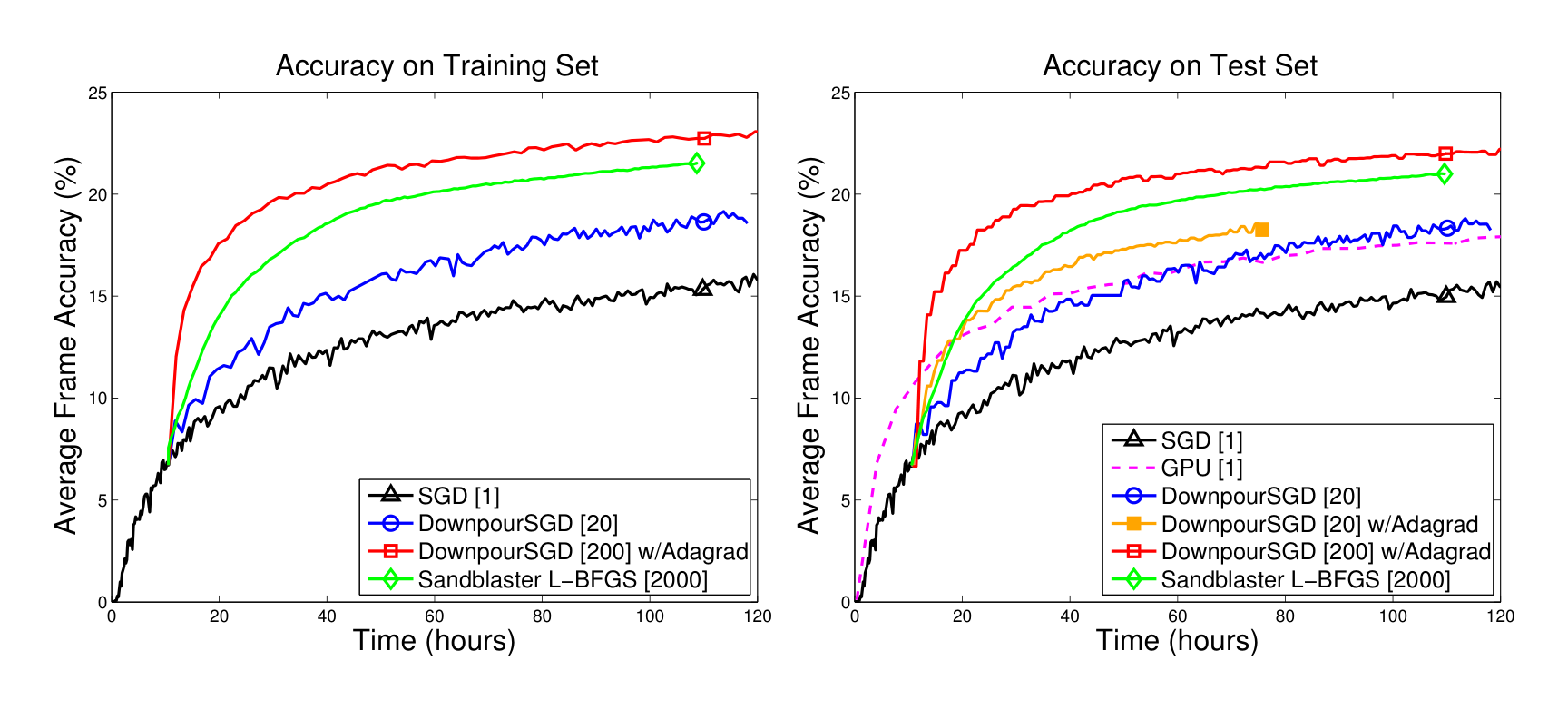
Optimization method comparisons: To evaluate the proposed distributed optimization procedures, we ran the speech model described above in a variety of configurations. We consider two baseline optimization procedures: training a DistBelief model (on 8 partitions) using conventional (single replica) SGD, and training the identical model on a GPU using CUDA [27]. The three distributed optimization methods we compare to these baseline methods are: Downpour SGD with a fixed learning rate, Downpour SGD with Adagrad learning rates, and Sandblaster L-BFGS.
Figure 4 shows classification performance as a function of training time for each of these methods on both the training and test sets. Our goal is to obtain the maximum test set accuracy in the minimum amount of training time, regardless of resource requirements. Conventional single replica SGD (black curves) is the slowest to train. Downpour SGD with 20 model replicas (blue curves) shows a significant improvement. Downpour SGD with 20 replicas plus Adagrad (orange curve) is modestly faster. Sandblaster L-BFGS using 2000 model replicas (green curves) is considerably faster yet again. The fastest, however, is Downpour SGD plus Adagrad with 200 model replicas (red curves). Given access to sufficient CPU resourses, both Sandblaster L-BFGS and Downpour SGD with Adagrad can train models substantially faster than a high performance GPU.
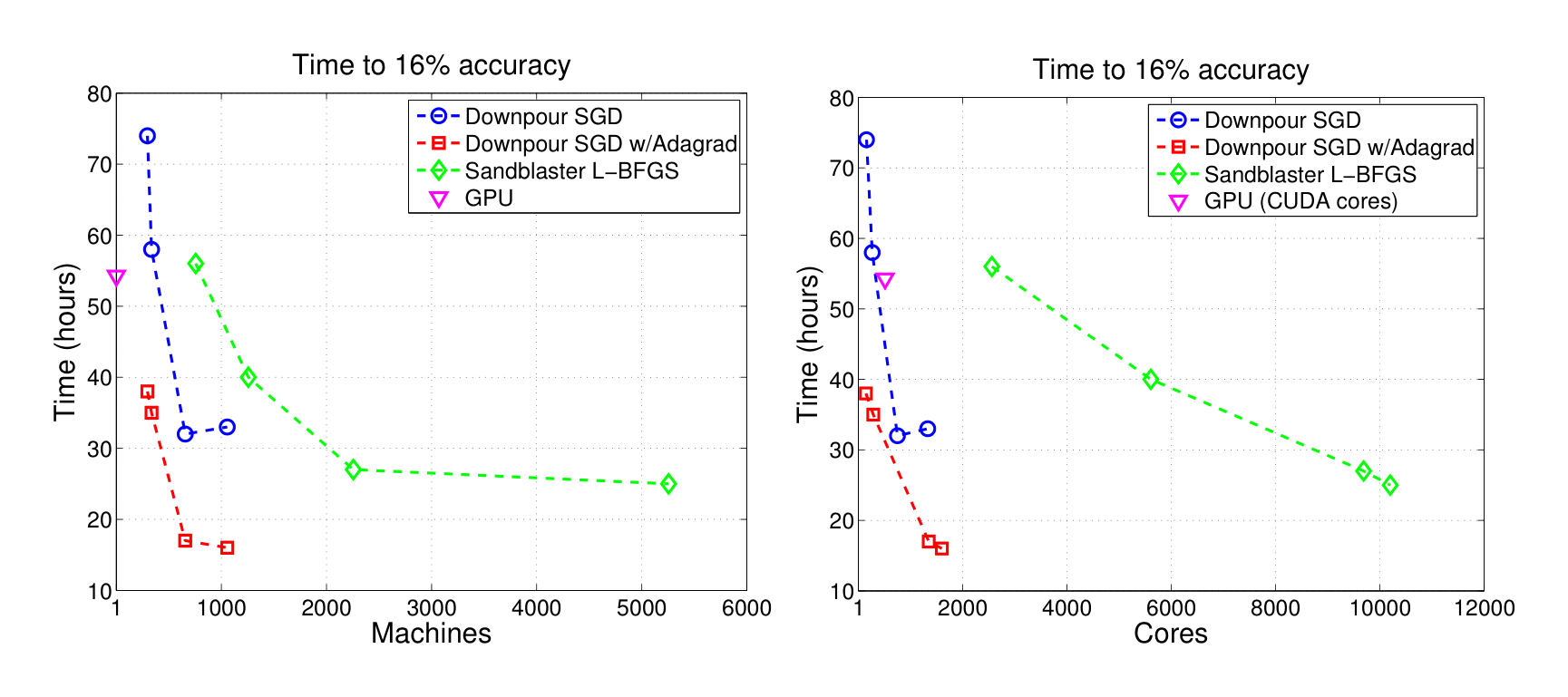
Though we did not confine the above experiments to a fixed resource budget, it is interesting to consider how the various methods trade off resource consumption for performance. We analyze this by arbitrarily choosing a fixed test set accuracy (16%), and measuring the time each method took to reach that accuracy as a function of machines and utilized CPU cores, Figure 5. One of the four points on each traces corresponds to a training configuration shown in Figure 4, the other three points are alternative configurations.
In this plot, points closer to the origin are preferable in that they take less time while using fewer resources. In this regard Downpour SGD using Adagrad appears to be the best trade-off: For any fixed budget of machines or cores, Downpour SGD with Adagrad takes less time to reach the accuracy target than either Downpour SGD with a fixed learning rate or Sandblaster L-BFGS. For any allotted training time to reach the accuracy target, Downpour SGD with Adagrad used few resources than Sandblaster L-BFGS, and in many cases Downpour SGD with a fixed learning rate could not even reach the target within the deadline. The Sandblaster L-BFGS system does show promise in terms of its scaling with additional cores, suggesting that it may ultimately produce the fastest training times if used with an extremely large resource budget (e.g., 30k cores).
Application to ImageNet: The previous experiments demonstrate that our techniques can accelerate the training of neural networks with tens of millions of parameters. However, the more significant advantage of our cluster-based approach to distributed optimization is its ability to scale to models that are much larger than can be comfortably fit on single machine, let alone a single GPU. As a first step toward exploring the capabilities of very large neural networks, we used Downpour SGD to train the 1.7 billion parameter image model described above on the ImageNet object classification task. As detailed in [29], this network achieved a cross-validated classification accuracy of over 15%, a relative improvement over 60% from the best performance we are aware of on the 21k category ImageNet classification task.
6 Conclusions
Section Summary: This paper introduces DistBelief, a system for training complex deep neural networks across many computers simultaneously, and explores various strategies for doing so efficiently. Researchers found that a flexible version of the standard training method called Downpour SGD works exceptionally well, especially when combined with Adagrad, which adjusts learning speeds automatically to handle the challenges of uneven updates in deep networks. Overall, these approaches allow for faster training on clusters of regular computers compared to single GPUs, enabling the creation of a massive model with over a billion parameters that outperformed top results on image recognition tasks.
In this paper we introduced DistBelief, a framework for parallel distributed training of deep networks. Within this framework, we discovered several effective distributed optimization strategies. We found that Downpour SGD, a highly asynchronous variant of SGD works surprisingly well for training nonconvex deep learning models. Sandblaster L-BFGS, a distributed implementation of L-BFGS, can be competitive with SGD, and its more efficient use of network bandwidth enables it to scale to a larger number of concurrent cores for training a single model. That said, the combination of Downpour SGD with the Adagrad adaptive learning rate procedure emerges as the clearly dominant method when working with a computational budget of 2000 CPU cores or less.
Adagrad was not originally designed to be used with asynchronous SGD, and neither method is typically applied to nonconvex problems. It is surprising, therefore, that they work so well together, and on highly nonlinear deep networks. We conjecture that Adagrad automatically stabilizes volatile parameters in the face of the flurry of asynchronous updates, and naturally adjusts learning rates to the demands of different layers in the deep network.
Our experiments show that our new large-scale training methods can use a cluster of machines to train even modestly sized deep networks significantly faster than a GPU, and without the GPU’s limitation on the maximum size of the model. To demonstrate the value of being able to train larger models, we have trained a model with over 1 billion parameters to achieve better than state-of-the-art performance on the ImageNet object recognition challenge.
Acknowledgments
The authors would like to thank Samy Bengio, Tom Dean, John Duchi, Yuval Netzer, Patrick Nguyen, Yoram Singer, Sebastian Thrun, and Vincent Vanhoucke for their indispensable advice, support, and comments.
7. Appendix
Section Summary: This appendix offers pseudocode examples for the client-side operations in Downpour SGD and Sandblaster L-BFGS, two approaches for training large machine learning models across distributed systems. Sandblaster is a framework that breaks down complex optimization tasks into simpler local calculations on parameter servers, which store and update model data in shards—for instance, dividing a billion-parameter model into ten parts so each server handles a tenth. This setup allows operations like multiplying scalars by vectors or computing inner products between vectors to be performed efficiently in a distributed way, minimizing communication between servers while keeping results aligned across the system.
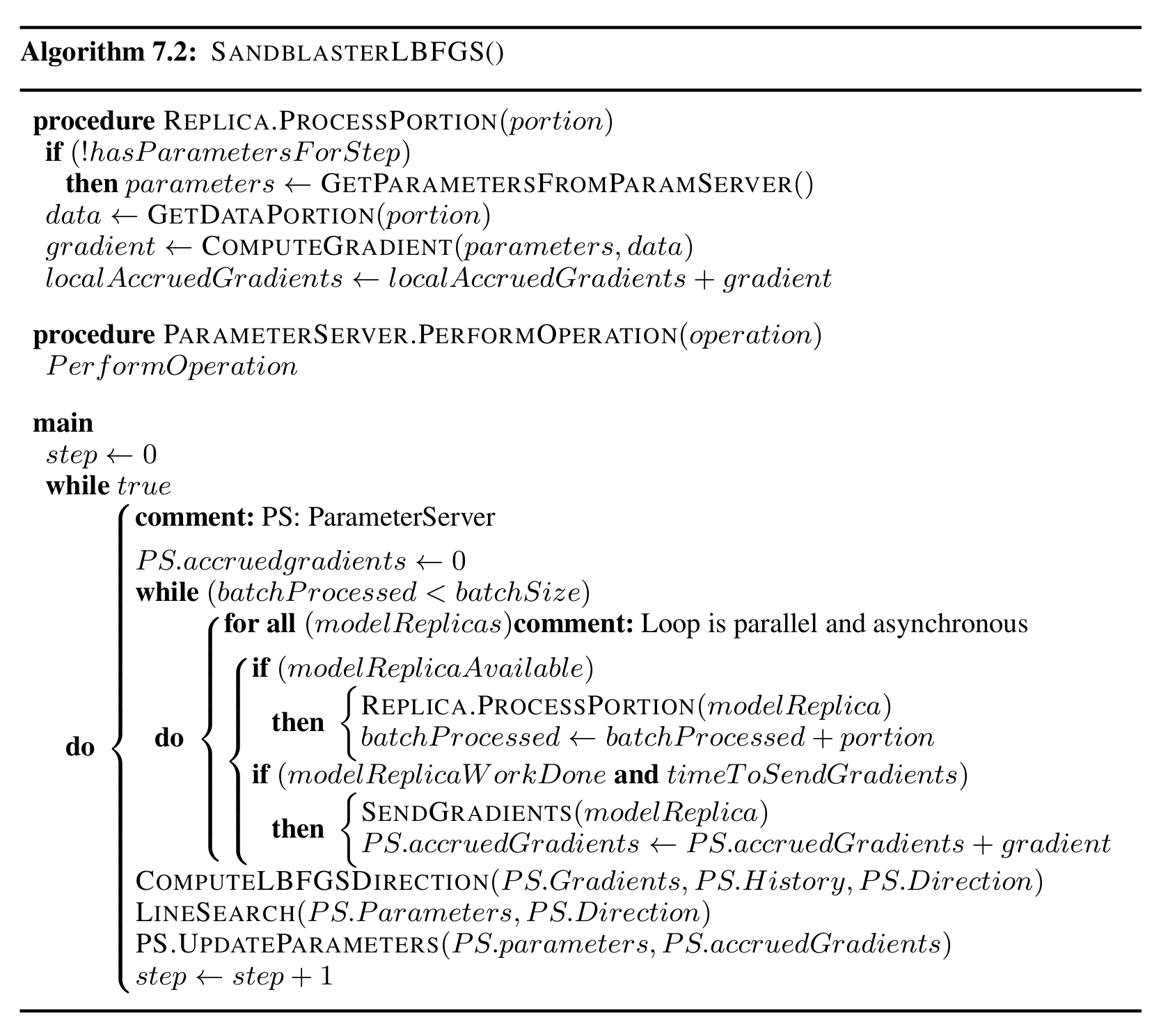
For completeness, here we provide pseudocode for the model replica (client) side of Downpour SGD (Algorithm 7.1), and Sandblaster L-BFGS (Algorithm 7.2).
Sandblaster is a framework for distributed batch optimization procedures. An essential concept in Sandblaster is decomposing operations into local computation on the DistBelief parameter server. By way of example, suppose we have 1 billion parameters and 10 parameter server shards, so that each shard has 1/10 of the parameters. It is possible to decompose L-BFGS into a sequence of scalar-vector products $(\alpha \times \mathbf{x})$ and vector-vector inner products $(\mathbf{x}^\top \mathbf{y})$, where each vector is 1 billion dimensional. If one shard is always responsible for the first 1/10 of every vector used internally in L-BFGS, and a second shard is always responsible for the second 1/10 of every vector, and so on up to the final shard always being responsible for the final 1/10 of every vector, it is possible to show that these scalar-vector and vector-vector operations can all be done in a distributed fashion with very little communication, so that any intermediate vector-valued results are automatically stored in the same distributed fashion, and any intermediate scalar-valued result is communicated to all the shards.
References
Section Summary: This section lists 29 key references from academic papers and technical reports spanning 1991 to 2012, focusing on the development and application of deep neural networks in fields like speech recognition, image classification, and language modeling. It includes influential works by researchers such as Geoffrey Hinton, Yann LeCun, and Andrew Ng, which explore training methods, optimization techniques, and large-scale computing frameworks to make these models more efficient and powerful. These citations highlight the foundational advancements that enabled modern machine learning systems to handle vast amounts of data on powerful hardware like GPUs.
[1] G. Dahl, D. Yu, L. Deng, and A. Acero. Context-dependent pre-trained deep neural networks for large vocabulary speech recognition. IEEE Transactions on Audio, Speech, and Language Processing, 2012.
[2] G. Hinton, L. Deng, D. Yu, G. Dahl, A. Mohamed, N. Jaitly, A. Senior, V. Vanhoucke, P. Nguyen, T. Sainath, and B. Kingsbury. Deep neural networks for acoustic modeling in speech recognition. IEEE Signal Processing Magazine, 2012.
[3] D. C. Ciresan, U. Meier, L. M. Gambardella, and J. Schmidhuber. Deep big simple neural nets excel on handwritten digit recognition. CoRR, 2010.
[4] A. Coates, H. Lee, and A. Y. Ng. An analysis of single-layer networks in unsupervised feature learning. In AISTATS 14, 2011.
[5] Y. Bengio, R. Ducharme, P. Vincent, and C. Jauvin. A neural probabilistic language model. Journal of Machine Learning Research, 3:1137–1155, 2003.
[6] R. Collobert and J. Weston. A unified architecture for natural language processing: Deep neural networks with multitask learning. In ICML, 2008.
[7] Q.V. Le, J. Ngiam, A. Coates, A. Lahiri, B. Prochnow, and A.Y. Ng. On optimization methods for deep learning. In ICML, 2011.
[8] R. Raina, A. Madhavan, and A. Y. Ng. Large-scale deep unsupervised learning using graphics processors. In ICML, 2009.
[9] J. Martens. Deep learning via hessian-free optimization. In ICML, 2010.
[10] J. C. Duchi, E. Hazan, and Y. Singer. Adaptive subgradient methods for online learning and stochastic optimization. Journal of Machine Learning Research, 12:2121–2159, 2011.
[11] Q. Shi, J. Petterson, G. Dror, J. Langford, A. Smola, A. Strehl, and V. Vishwanathan. Hash kernels. In AISTATS, 2009.
[12] J. Langford, A. Smola, and M. Zinkevich. Slow learners are fast. In NIPS, 2009.
[13] G. Mann, R. McDonald, M. Mohri, N. Silberman, and D. Walker. Efficient large-scale distributed training of conditional maximum entropy models. In NIPS, 2009.
[14] R. McDonald, K. Hall, and G. Mann. Distributed training strategies for the structured perceptron. In NAACL, 2010.
[15] M. Zinkevich, M. Weimer, A. Smola, and L. Li. Parallelized stochastic gradient descent. In NIPS, 2010.
[16] A. Agarwal, O. Chapelle, M. Dudik, and J. Langford. A reliable effective terascale linear learning system. In AISTATS, 2011.
[17] A. Agarwal and J. Duchi. Distributed delayed stochastic optimization. In NIPS, 2011.
[18] F. Niu, B. Retcht, C. Re, and S. J. Wright. Hogwild! A lock-free approach to parallelizing stochastic gradient descent. In NIPS, 2011.
[19] J. Bergstra, O. Breuleux, F. Bastien, P. Lamblin, R. Pascanu, G. Desjardins, J. Turian, D. Warde-Farley, and Y. Bengio. Theano: a CPU and GPU math expression compiler. In SciPy, 2010.
[20] D. Ciresan, U. Meier, and J. Schmidhuber. Multi-column deep neural networks for image classification. Technical report, IDSIA, 2012.
[21] L. Deng, D. Yu, and J. Platt. Scalable stacking and learning for building deep architectures. In ICASSP, 2012.
[22] A. Krizhevsky. Learning multiple layers of features from tiny images. Technical report, U. Toronto, 2009.
[23] J. Dean and S. Ghemawat. Map-Reduce: simplified data processing on large clusters. CACM, 2008.
[24] Y. Low, J. Gonzalez, A. Kyrola, D. Bickson, C. Guestrin, and J. Hellerstein. Distributed GraphLab: A framework for machine learning in the cloud. In VLDB, 2012.
[25] L. Bottou. Stochastic gradient learning in neural networks. In Proceedings of Neuro-Nîmes 91, 1991.
[26] Y. LeCun, L. Bottou, G. Orr, and K. Muller. Efficient backprop. In Neural Networks: Tricks of the trade. Springer, 1998.
[27] V. Vanhoucke, A. Senior, and M. Z. Mao. Improving the speed of neural networks on cpus. In Deep Learning and Unsupervised Feature Learning Workshop, NIPS 2011, 2011.
[28] J. Deng, W. Dong, R. Socher, L.-J. Li, K. Li, and L. Fei-Fei. ImageNet: A Large-Scale Hierarchical Image Database. In CVPR, 2009.
[29] Q.V. Le, M.A. Ranzato, R. Monga, M. Devin, K. Chen, G.S. Corrado, J. Dean, and A.Y. Ng. Building high-level features using large scale unsupervised learning. In ICML, 2012.